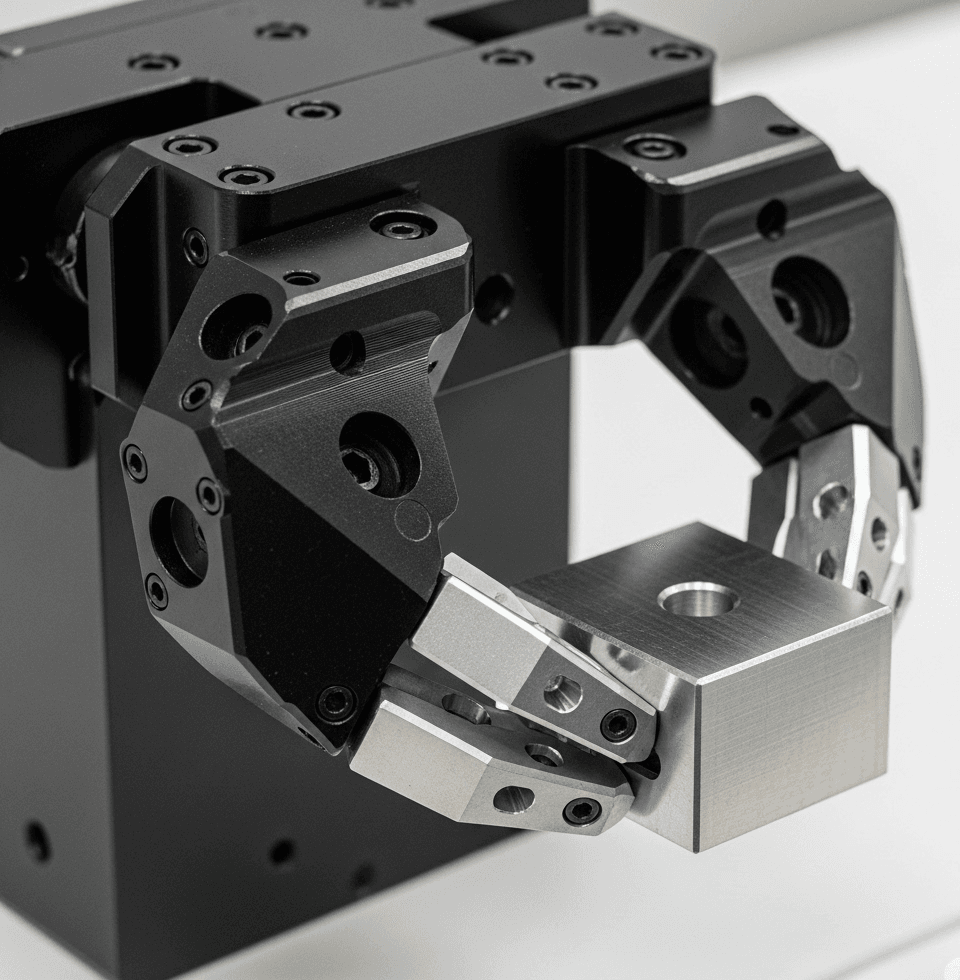
The robot gripper base is the foundational component of any end-of-arm tooling (EOAT) system. It serves as the rigid, precise interface between the robot arm and the gripper finger parts that handle the workpiece. At ly-machining, our core competency is the CNC machining of these bases, ensuring absolute reliability in demanding automation environments.
Through advanced CNC milling, we transform solid blocks of material, typically high-strength 7075 aluminum, into lightweight, robust structures. Every robot gripper base we produce is engineered for maximum precision, providing a stable platform for any workholding task.

CNC Machining Challenges for Gripper Bases
Manufacturing a robot gripper base presents unique engineering challenges that demand expert CNC machining. The single most critical aspect is the flatness and positional accuracy of the mounting interface to the robot arm. Any deviation here is magnified at the gripper, leading to positioning errors.
Furthermore, these parts require extensive lightweighting through deep pockets and thin walls, a CNC milling task that risks part vibration and warping if not managed correctly. We must also maintain perfect parallelism on the mounting surfaces for the gripper finger parts to ensure they close accurately and apply consistent force.

Our CNC Machining & Milling Process
Our process for every robot gripper base starts with a Design for Manufacturability (DFM) analysis to optimize the design for production. We utilize 5-axis CNC machining centers, which are essential for machining complex features on multiple faces in a single setup. This minimizes tolerance stack-up and ensures high precision.
The CNC milling strategy begins with intelligent roughing to remove bulk material for lightweighting. We then execute fine finishing passes on all critical surfaces. Features like dowel pin holes, threaded inserts, and mounting surfaces for gripper finger parts are machined to tolerances measured in microns, guaranteeing perfect alignment and assembly.

Performance Gains from Precision CNC Machining
A robot gripper base produced by our meticulous CNC machining process delivers superior performance and reliability. The exceptional flatness and positional accuracy of the mounting faces ensure the gripper is perfectly true to the robot arm’s coordinate system, eliminating a common source of programming errors.
Our ability to execute complex CNC milling for lightweighting allows your robot to move faster and handle heavier payloads. The precision-machined surfaces for the gripper finger parts ensure consistent, repeatable gripping, reducing the risk of dropped parts and production downtime.

Data-Driven Performance: Gripper Base Tolerances
Our engineering-led approach to CNC machining results in components that demonstrably outperform standard parts. This table highlights the typical tolerances we maintain.
Case Study: Eliminating Dropped Parts for an Automotive Supplier
An automotive client was experiencing intermittent failures where their robot would drop forged components. The issue was traced to their existing gripper base, where the mounting surfaces for the gripper finger parts were not sufficiently parallel, causing an inconsistent grip.
ly-machining re-engineered the CNC machining process for the robot gripper base. By moving to a single-setup 5-axis strategy, we were able to hold a parallelism of 0.02mm. The new bases eliminated the gripping inconsistencies entirely, resulting in zero dropped parts and a 5% increase in production throughput.

Frequently Asked Questions (FAQ)
1. How do you guarantee the flatness and parallelism on a complex robot gripper base?
From an engineering standpoint, this is achieved through our process control. We use 5-axis CNC machining to machine the primary robot mount and the finger mounts in the same clamping operation. This technique inherently makes them highly parallel and perpendicular to each other. We then verify these critical geometric tolerances on every part using our CMMs.
2. Can you machine both the robot gripper base and the custom gripper finger parts?
Yes, absolutely. We provide a complete solution. We perform CNC machining for the main robot gripper base and can simultaneously manufacture custom gripper finger parts to your exact specifications. Whether they are simple blanks or complex, contoured fingers designed to hold a unique part, we can produce the entire assembly.
3. Can you help us reduce the weight of our current gripper design?
This is a key part of our engineering value. We encourage you to send us your existing design. Our team can analyze it and recommend CNC milling strategies for lightweighting, such as adding pockets or changing wall thicknesses, without compromising the structural integrity required for the gripping force and payload. This can directly improve your robot’s performance.
Related products
 Aluminum
AluminumAluminum precision parts
-
Aluminum
Bicycle precision aluminum parts
-
-
Aluminum
Headphone metal accessories



